Efficient object manipulation is crucial for robots to seamlessly assist humans in various everyday tasks. Recent research by Improbable AI Lab and MIT has led to the development of a novel two-finger robotic gripper, aimed at enhancing robots’ ability to pick up and place objects with varying shapes and textures.
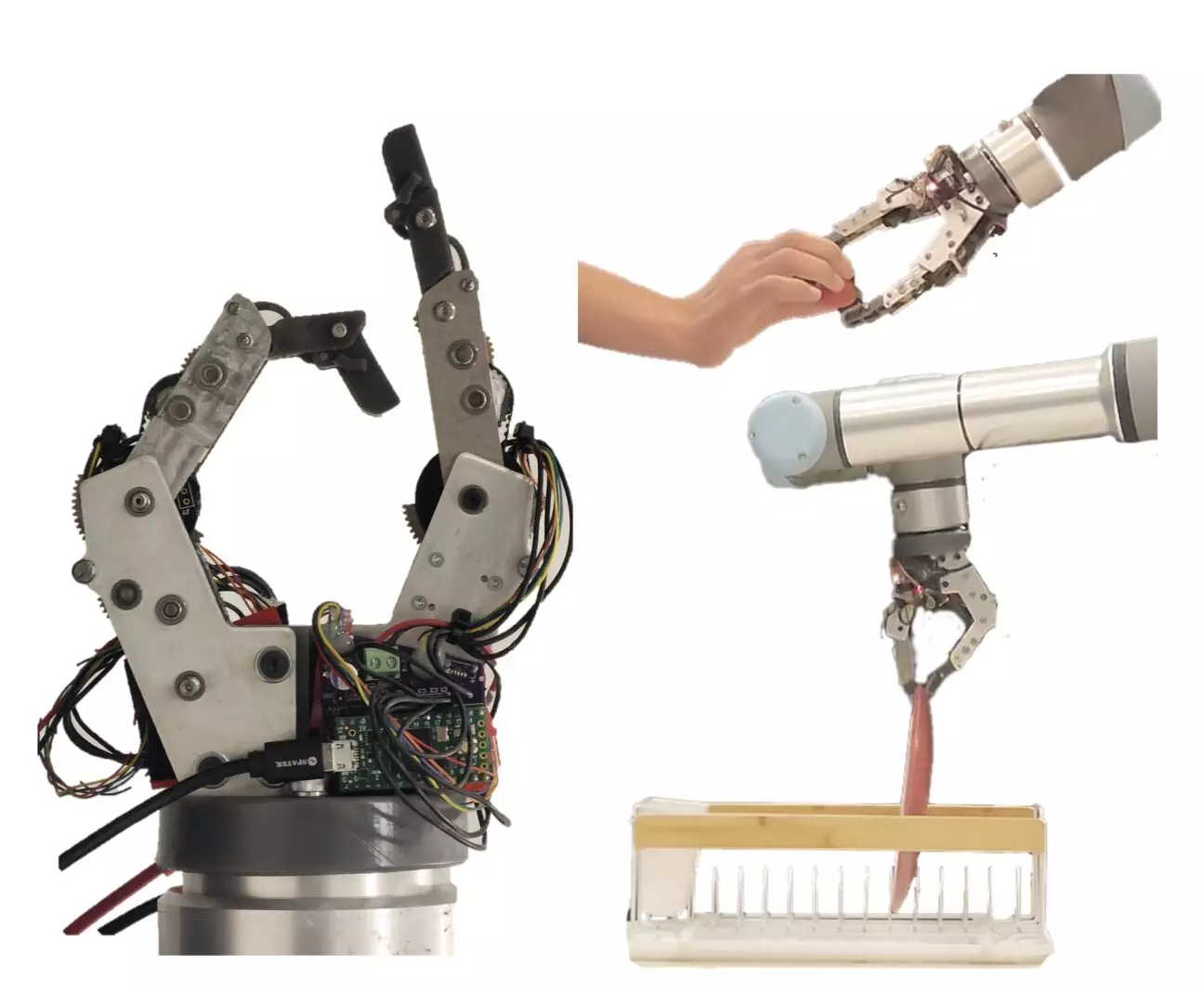
The robotic gripper features two fingers that closely resemble human fingers in terms of size and shape. This design allows the fingers to bend and tightly grasp objects, making them ideal for simple everyday tasks such as picking up and placing objects at specific locations. The focus of the research team was to create compact fingers that could deliver high performance, leading to the development of the “everyday finger” based on series-elastic actuation.
While the current gripper has two degrees of freedom (DOF), the researchers acknowledge the possibility of adding more fingers in future iterations. By increasing the DOF, the gripper’s capabilities can be further expanded, potentially allowing for the development of three- or four-fingered hands. However, the addition of a fifth finger may require more advanced actuators with increased torque density.
To evaluate the performance of their two-finger gripper, the researchers conducted real-world experiments. These experiments assessed the speed, compliance, and force exerted by the gripper during basic “pick-and-place” tasks. The results of the experiments were highly promising, as the gripper successfully completed all tasks, including picking up delicate objects like strawberries and thin, flat objects like paper.
The success of the two-finger gripper in basic tasks highlights its potential for use in household robots. By further refining the design and expanding the range of tasks the gripper can perform, researchers aim to create robots that can assist with a variety of daily activities. The gripper’s compact design and human-like functionality make it well-suited for applications in domestic settings.
The development of a two-finger robotic gripper by researchers at Improbable AI Lab and MIT represents a significant advancement in the field of robotic manipulation. The gripper’s ability to effectively handle everyday tasks paves the way for the creation of more sophisticated household robots that can assist humans in a variety of settings. Continued research and development in this area are expected to further enhance the capabilities of robotic grippers and expand their potential applications.
Leave a Reply