In a world where technological innovations often borrow from natural designs, the intricacies of the elephant trunk stand out as a remarkable blueprint for engineering. The elephant’s trunk, a marvel of biological versatility, serves a myriad of functions — from grabbing food to social interactions — all thanks to its complex muscular structure. The excitement around the recent findings published in *Physical Review Letters* highlights an innovative model that mimics this intricate tool with astonishing efficiency, utilizing just three actuators. This breakthrough doesn’t just deepen our comprehension of biomechanics; it also ignites a revolution in robotics and artificial limb design.
Understanding the Elephant Trunk’s Anatomy
An elephant’s trunk contains an impressive array of 17 muscles, including eight on either side and one dedicated to its nasal cavity. The control of these muscles is orchestrated by a vast network of tens of thousands of muscle fibers and approximately 60,000 facial neurons, giving rise to a level of dexterity that is unrivaled in the animal kingdom. Researcher Alain Goriely from the University of Oxford emphasized the trunk’s potential as a “paradigm for control of filamentary shape,” pointing out its resemblance to the growing arms of octopuses and climbing plants. This cross-referential understanding of nature paves the way for engineers to craft new devices that can interact with the world as dynamically as the trunk itself.
From Concept to Mathematical Model
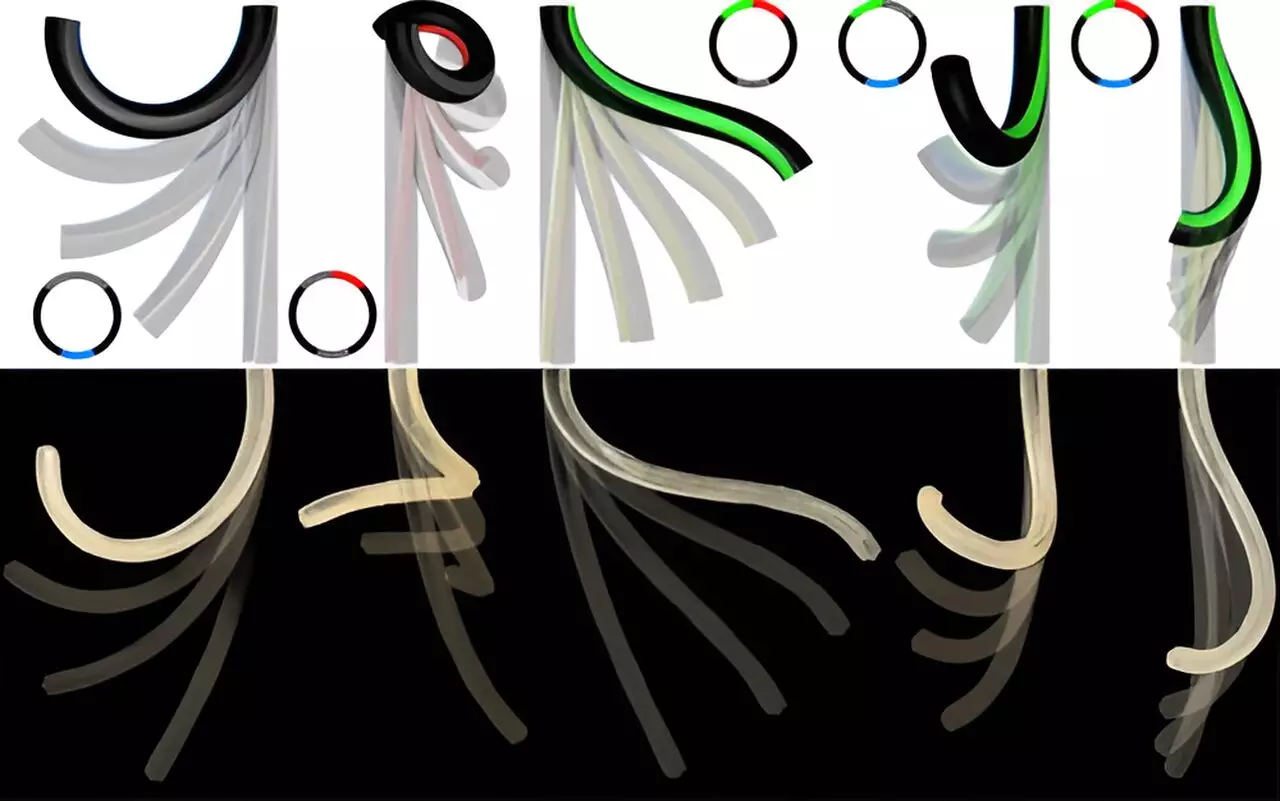
To replicate the elephant’s extraordinary functionality, the interdisciplinary team, comprising engineers from Stanford University and mathematicians from Oxford, began by developing a mathematical model that encapsulates the trunk’s elongation, twisting, and bending capabilities. They focused on activating both longitudinal and helical “muscles,” which allowed them to simulate the perfect balance of curvature and torsion. It’s fascinating how mathematical representations can illuminate the mechanics of living systems, serving as a bridge between biological studies and engineering applications.
Crafting the Physical Model
The translation of their mathematical model into a physical device involved innovative engineering techniques, including 3D printing. By forming a slender, soft, polymer-based cylindrical structure embedded with liquid-crystalline elastomer fibers, the team effectively created a trunk-like arm that responds exquisitely to electronic stimuli. When electrically heated, these fibers contract, mimicking the action of muscles. This revolutionary approach allows for independent control over each actuator, showcasing an astonishing ability to recreate the trunk’s motility in a controlled manner.
The Superiority of the Minimal Design
What sets this minimal trunk design apart from traditional robotic arms is its impressive reachability, the three-dimensional movement it can achieve. The team found that the model’s “reachability cloud” encompasses a full 360-degree arc, confirming its ability to perform dynamic movements and adapt to different scenarios. Unlike previous designs that relied heavily on multiple longitudinal or helical actuators, this model’s combination of one longitudinal and two helical actuators not only maximizes its spatial reach but enables flexible, complex actions like grasping and rotating objects — tasks that are crucial in many robotic applications.
Implications for Robotics and Beyond
The potential applications of this biologically inspired model extend far beyond mere mechanical mimicry. With its distinct advantages, the trunk-like arm could be transformative in fields such as robotics, particularly in the development of arms for production lines or robotic vehicles that navigate complex terrains with agility. Moreover, the principles learned from this research may inform the design of prosthetics that require a high degree of flexibility and control, mimicking the natural movements of the human body.
Challenges and Future Research
Despite its innovations, the model does have limitations, such as its inability to elongate or shorten and questions surrounding its load-handling efficiency. These challenges present intriguing avenues for future exploration. The team’s findings will undoubtedly spark further inquiries into optimizing actuator designs and enhancing the trunk’s capabilities in various contexts. Researchers must continue to push the boundaries of our understanding, seeking solutions that could help bridge the gap between biological function and technological application.
Through the lens of the elephant trunk’s design, the fusion of mathematics, biology, and engineering can lead to groundbreaking innovations that enhance both mechanized technologies and our understanding of natural systems. As we marvel at the complexity of nature, we also stand at the precipice of unlocking its secrets to revolutionize our technological landscapes.
Leave a Reply