In the realm of robotics, one of the ongoing challenges has been to mimic the deftness and adaptability of human movements. Whether reaching for a book on the shelf or deftly navigating a cluttered kitchen counter, human actions are often taken for granted—yet they involve intricate cognitive and physical processes. A significant breach in the traditional methods of robotic motion planning has been addressed by a research team at Carnegie Mellon University’s Robotics Institute, which has introduced a groundbreaking approach known as Neural Motion Planning (NMP). This innovative model promises to enhance how robots function in unpredictable environments by replicating human-like agility and adaptability.
Robotic systems often struggle with motion planning, the process that dictates how a robot navigates its environment to reach a specified target without colliding into obstacles. Traditional algorithms involve a labor-intensive approach that requires extensive computational power for collision checks. In simpler terms, every time a robot attempts to move, it must process thousands, if not millions, of possible interactions with its environment to ensure safe navigation. This slow, cumbersome process can severely limit the efficiency and versatility of robots, especially in dynamic settings filled with various potential obstructions.
Murtaza Dalal, a doctoral candidate at the Robotics Institute, articulates the frailties of existing methods: “When you deploy a robot, you want it to operate in unstructured or unknown settings—environments where you can’t assume that you know everything.” This reality underscores the necessity for a more adaptable approach that allows robots to interact effectively within their surroundings without being bogged down by the limitations of classic motion planning techniques.
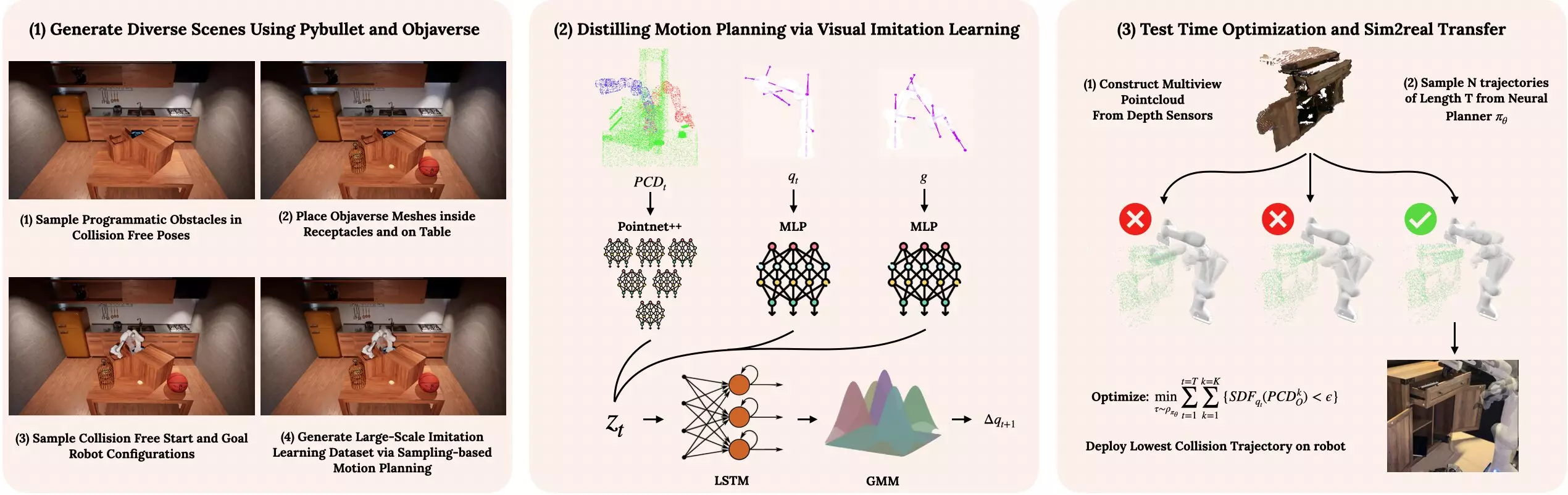
Drawing inspiration from human learning, the NMP framework mimics how individuals adapt to new experiences and develop proficiency over time. When humans learn new skills, they transition from cautious, slow actions to rapid, confident maneuvers. In a similar manner, Neural Motion Planning uses an artificial intelligence network that facilitates agile motion planning tailored to a range of household environments—be it navigating around a dish cupboard or maneuvering within the tight confines of a refrigerator.
To foster this capability, researchers conducted extensive simulations that encompassed a multitude of complex settings, replicating common household scenarios replete with obstacles like pets, kitchenware, and furnishings. This rigorous training ultimately allowed the model to produce a generalized policy capable of executing diverse tasks based on various real-world configurations that it had never seen before. As Deepak Pathak, an assistant professor at the Robotics Institute, aptly notes: “This work is a stepping stone toward that goal.” He emphasizes that leveraging large-scale learning principles used in other AI fields can lead to significant advancements in robotics.
Implementing NMP atop a robotic arm, the lab witnessed remarkable performances where the robotic system adeptly navigated unfamiliar environments. By using depth cameras to create three-dimensional representations of its surroundings, the robotic arm could calculate the optimal movements needed to avoid barriers while completing designated tasks. The findings from these experiments display not just the efficacy of Neural Motion Planning but also its potential across a multitude of applications, ranging from household assistance to more complex industrial tasks.
Reflecting on the experimental success, Jiahui Yang, a master’s student at the Robotics Institute, expressed enthusiasm at the model’s ability to deftly maneuver around a variety of obstacles, including furniture and other objects. The exciting prospect lies in the ability to deploy NMP in real-world settings, enabling greater autonomy and efficiency within robotic systems.
As the realm of robotics continues to advance, Neural Motion Planning stands at the forefront of reimagining how robots can operate within unfamiliar and ever-changing environments. This research not only bridges the gap between human and robotic capabilities but also paves the way for robots to be more integrated into daily life, making them indispensable allies in a multitude of settings. The future, with NMP as a pivotal component, looks promising for creating smarter, more adaptable robotic systems that can seamlessly assist us in our daily tasks.
Leave a Reply