Robotic grippers have been evolving over the years to effectively handle various object manipulation tasks. Inspired by human hands, these grippers have typically performed well but often come with complex mechanisms and advanced programming requirements. This complexity can hinder their widespread deployment, as they may not be practical for developing energy-efficient and cost-effective robots.
Researchers at Purdue University and MIT have recently introduced a new robotic gripper that aims to bridge the gap between high degrees of freedom (DOF) robotic hands and simpler parallel-jaw grippers. This gripper, with only 5 DOF, is designed to provide a balance between control and dexterity. By integrating a vision-based tactile sensor, the gripper can perform intricate in-hand manipulation tasks efficiently.
The Design of the Gripper
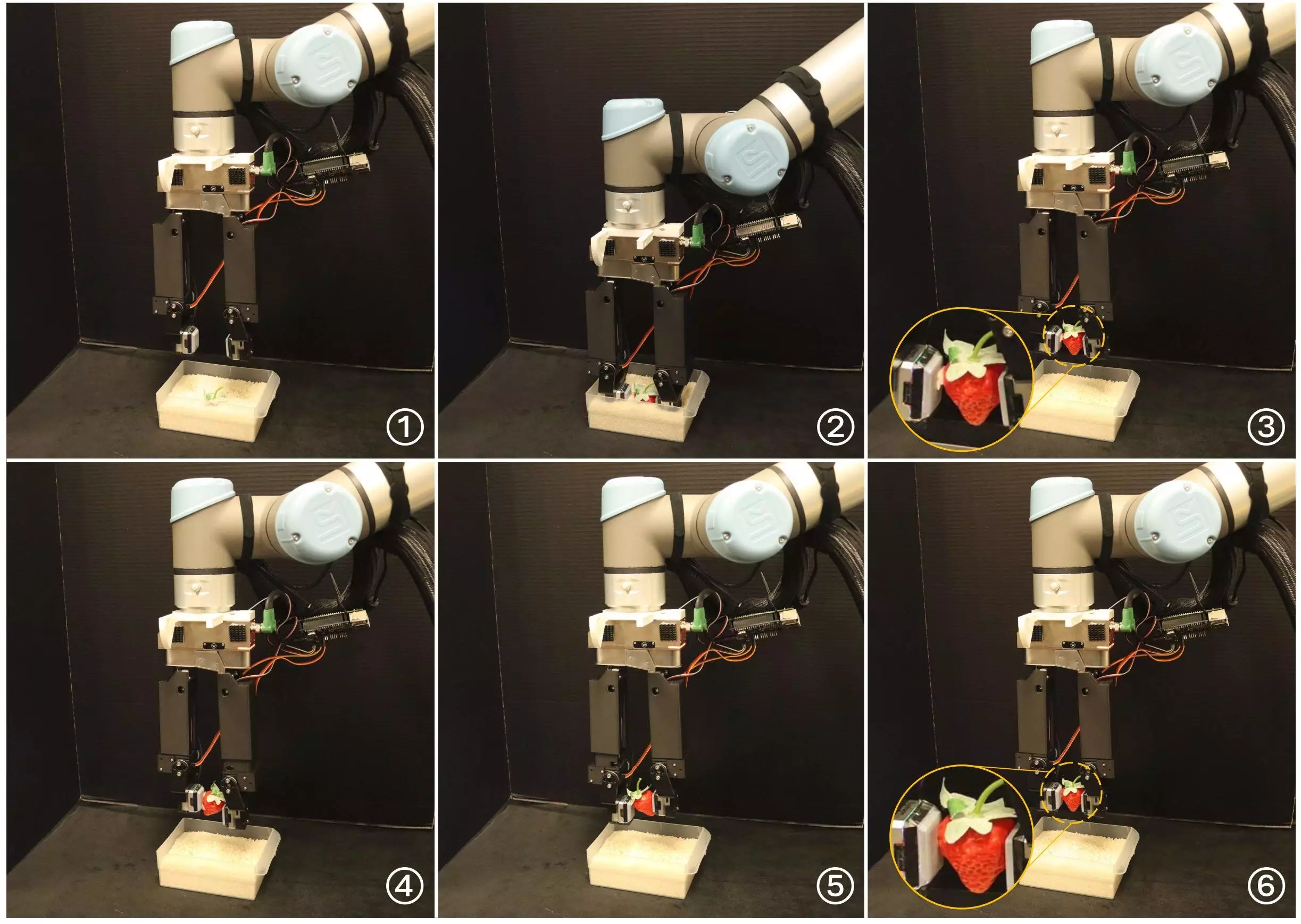
The newly developed gripper consists of two fingers attached to a gripper base, with an integrated vision-based tactile sensor on the left fingertip. This simplistic design allows for easier control through programming tools while still achieving human-like manipulation capabilities. The gripper’s fingers are made from PLA material using 3D printing, with each finger equipped with a linear actuator and a rotational servo motor.
Despite having fewer DOF than conventional robotic hands, the new gripper showcased impressive performance in real-world experiments. It successfully completed tasks such as singulation and scooping, demonstrating its ability to handle intricate manipulation tasks effectively. The researchers believe that this simplified gripper design can lead to more robust, cost-effective, and energy-efficient robotic solutions.
Future Prospects
The development of this tactile gripper opens up opportunities for tackling more challenging object manipulation tasks that were previously difficult for simpler grippers. The researchers are optimistic about the potential applications of this gripper in various industries and its contribution to the advancement of robotic systems. The design of this gripper could serve as inspiration for the development of other similar cost-effective and efficient robotic solutions in the future.
Leave a Reply